# How to Make It Stop at the Station mBot neo Train
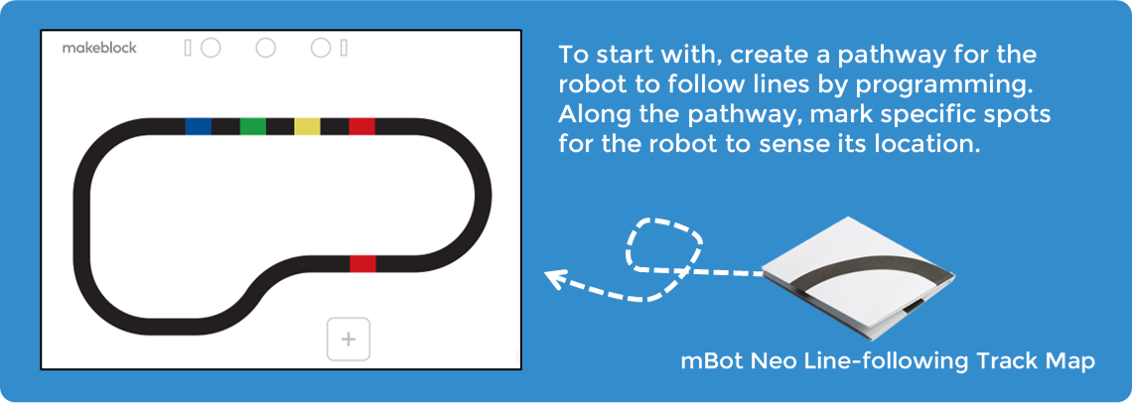
Following this # How to, you can design a program for toy train drawing into the station through block-based coding. To achieve color recognition and line-following, mBot2 toy train makes the coding process much easier equipped with Quad RGB Sensor.